LOADING
最先端のメカトロ技術を駆使し、
当社が手がけた事例の一部をご紹介します。
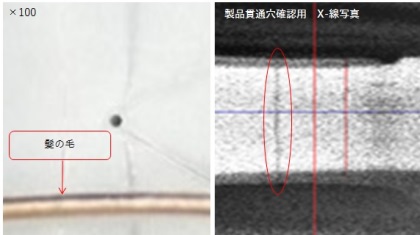
| 仕様 | φ0.05の穴 長さ2mm貫通した射出成型品 |
|---|---|
| 用途 | 流路調整(光、液体、気体等) |
| 製品特長 | 同軸度φ0.01以内でφ0.05~の貫通孔を実現 |
| 材料 | ABS、POM(実績有) |

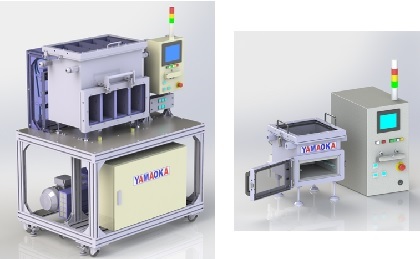
| 概要 | マガジンから供給されたリードフレーム製品を金型にて個片化し、専用マガジンへ整列収納します。 |
|---|---|
| 型式 | TLC406 |
| 能力 | 0.25s/個 |
| 機械寸法 | W2200mm×D1350mm×H1600mm |
| 基本仕様 | 制御 | PLC制御 |
|---|---|---|
| 走行駆動 | DCギヤモータ | |
| ローラ駆動 | DCモータローラ | |
| ストッパ駆動 | DCモータ | |
| バッテリー | li-ionバッテリー(12V/5Ah)×2 | |
| 充電 | 非接触充電 | |
| 連続稼働時間 | 24時間 *非接触充電による連続運転 | |
| 駆動輪 | Φ150mmウレタン車輪 | |
| 従動輪 | ウレタン自在キャスタ | |
| 6輪走行(駆動輪2、従動輪4) | ||
| 走行仕様 | 誘導 | センサーによる磁気テープ読取 |
| 番地読取 | センサーによる磁気マーク読取 | |
| 走行方向 | 前後進 | |
| 最高速度 | 約45m/分(無負荷時) | |
| 停止精度 | ±約5mm | |
| 可搬重量 | 250kg |

| 協調ロボット | |
| メーカ | オムロン |
|---|---|
| 型式 | TM5-900 |
| 備考 | 最大可搬重量:4kg アーム長:900mm 500万画素カラーカメラ搭載 |
| エンドエフェクタ | |
| メーカ | Robotiq |
| 型式 | HAND-E |
| 備考 | 重量:1kg |
| インバータ式倍速チェーンコンベア |
| 電動ストッパ |
| 双方向光通信機 (パラレル8bit) |
| 2D LiDAR |
まずはお話しをお伺いし、ご希望に沿えるように現状の問題点を整理し、改善策を作り上げます。
お困りの事があればご遠慮なくご連絡ください
センサーが電解液成分を検出して合否を判定します。
デモ機をご用意しておりますので、お気軽にご試用をお申し付けください。
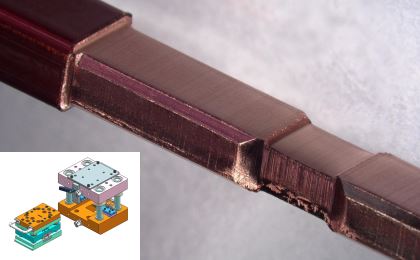
| 概要 | 平角線の被覆剥き処理します |
|---|---|
| 型式 | - |
| 能力 | - |
| 機械寸法 | - |
| 協調ロボット | |
| メーカ | オムロン |
|---|---|
| 型式 | TM5-900 |
| 備考 | 最大可搬重量:4kg アーム長:900mm 500万画素カラーカメラ搭載 |
| エンドエフェクタ | |
| メーカ | Robotiq |
| 型式 | HAND-E |
| 備考 | 重量:1kg |
| インバータ式倍速チェーンコンベア |
| 電動ストッパ |
| 双方向光通信機 (パラレル8bit) |
| 2D LiDAR |
まずはお話しをお伺いし、ご希望に沿えるように現状の問題点を整理し、改善策を作り上げます。
お困りの事があればご遠慮なくご連絡ください